The creation of small, portable infusion pumps opened a new chapter in medical care. A patient can receive carefully metered and timed doses of medicine, without requiring a visit to the medical practitioner, allowing life to be less restrictive. Ambulatory pumps have been developed to deliver insulin, nutritive supplements and anticancer drugs.
Medical equipment such as this demands extremely high reliability. So during the design phase, it's important to take into account the complete system: the pump itself, the motor, the driver, and the feedback. Miniaturization is crucial, for convenience to the user, especially with portable equipment. The patient should not be disturbed by the pump noise, either at rest or in social surroundings. For this reason, por table batter y-powered pumps need a very efficient and quiet motor. When choosing a DC motor type, there are numerous advantages and disadvantages, depending on which technology you choose, whether Brush DC, Brushless DC, or Stepper technologies.
DC MOTORS — PROS AND CONS
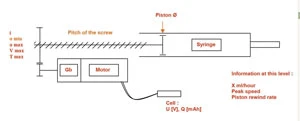
In this article, we will use a small syringe pump as example. A typical design is a piston moved by a lead screw, the screw or the nut driven with a micro-motor.
Micro-motors used in medical pumps have very specific requirements. To select the electrical motor, the design engineer has the choice of different technologies. The primar y motor function is to convert electrical power into mechanical power. The goals of the motor are to: deliver a specified torque; move a specified angle in a given time; be very quiet; be as small as possible; and be very efficient.
Today's design engineers have the choice between three major technologies: DC ironless motor mounted on a gearbox and an encoder; brushless motor with a gearbox and sometimes an encoder; and stepper motor, either direct drive or with a gearbox, and sometimes an encoder.
THE BRUSH DC MOTOR

DC ironless core motor design and features.
Brush-type motors fall into one of two sub-categories — the iron core design and the ironless design. The latter is usually selected for battery-operated portable pump applications because it has no iron losses. With a DC ironless motor, the majority of the losses are not only due to the copper losses, which are proportional to the coil resistance (copper volume), but also to the current squared in the motor. The current in the motor is proportional to the motor torque.
System efficiency must be optimized for a battery application. Precious metal commutation allows motor efficiencies up to 90%. Usually R/ k2, which represents the power lost by joule effect in the winding, is an excellent figure of merit to compare a motor versus another. For a given size of motor, this figure is more or less constant — adjusting the winding to the battery doesn't change this parameter. However, if the choice arises, choose the motor having the smallest possible R/k2 ratio. It will offer a better efficiency.
The mechanical power is the torque multiplied by the speed. Intuitively, the best way to increase the efficiency of the motor is to get the power needed while running the motor at high speed. For the same mechanical power, the higher the speed is, the lower the necessary torque and the joule losses will be. New magnet technology has helped today's DC ironless motors achieve higher torque than ever before. Ironless motors also have a very low inductance and a commutation with small contact surface and pressure, resulting in a small electrical resistance and a very small friction.
THE BRUSHLESS DC MOTOR (BLDC)
A DC motor's life depends on its bearings and the brushes. With the introduction of the brushless motor, this dependency was reduced to the bearing life, which in some applications is a strong advantage. In a BLDC motor the coils are fixed and the magnet is part of the rotor. Commutation in the coils is done electronically. Usually the external tube closing the magnetic field of the magnet is fixed, generating iron losses while the magnet is rotating. In applications where inertia is not critical, the tube and the magnet can rotate together, removing iron losses.
As with the brushed motor, The BLDC motor falls into one of two categories, the slotless and the slotted design. The slotless design has the advantage of no cogging or detent torque, and having less iron loss than a slotted design. Slotted design motors are typically employed in tough environments, as when the product requires autoclave sterilization. New high energy magnets are making slotless design the preference in small motors.
The disadvantages of the traditional BLDC motor versus a DC ironless motor lie in its lower efficiency due to iron losses, and lower torque for the same size unit. One way to compensate for the losses is to use the BLDC motor at higher speeds, taking into account this parameter when selecting a gearbox.
A BLDC's driver and controller are critical to the efficiency of the system. There are several ways to drive the BLDC motor: drive the motor as a stepper with an open loop, wherein the current in the phase is linked not to the real rotor position but rather to a theoretical rotor position; drive the motor sensor less by using the EMF of each phase as information to commutate current in the phases; and drive the motor as a servo motor by using a position sensor to commutate the phases.
For a small medical pump, one can drive such a stepper at low speed and a BLDC at higher speed.

During theoptimization phase,it is important tofocus on systemefficiency.
THE STEPPER MOTOR
By definition, a stepper motor is a BLDC with many poles; the current in each phase will have to be commuted many times per revolution. This design has the strong advantage of having many stable positions (steps) per revolution, providing a high torque for a given size. The disadvantage of a stepper is that it is not able to run at high speed, due to the inductance combined with the commutation frequency, and due to iron losses.
Different technologies of stepper motors are available:
- Variable reluctance
- Permanent magnet (Can Stack)
- Hybrid
- Disc magnet technology (TurboDisc)
As with the BLDC motor, stepper motors can be driven in different ways: open loop in full step, half step or micro stepping mode, and closed commutation loop like a servo motor.
For small portable pumps, stepper motors are the primary selection, if at low speed, they can be used in full step mode, and the detent torque is sufficient to hold the load. In this case, they are driven like a watch motor — the right quantity of energy is delivered to move one step to the next, while at stall position no current is applied in the phase. At high speeds, there are two options: either the motor has to run at high speed intermittently, then driven as a regular stepper; or the motor needs to operate many times at high speed, increasing efficiency by closing the commutation loop like a regular servo motor.
In some applications, a stepper solution with a gearbox may be the most economical design, since no encoder is required. In addition, at stall position no energy will be needed if the detent torque is strong enough to maintain the position.
GEARBOXES AND ENCODERS
As mentioned earlier, a DC motor operating at high speed often requires a gearbox between the motor and the application. Different styles of gearboxes are available, including types with planetary or spur gears, and units with belt drives. Gearboxes are defined by the output torque needed, the gear ratio, and the efficiency desired. A spur gearbox has a better efficiency than a planetary gearbox for a given size and gear ratio, but a planetary system will be able to handle a stronger torque.
During the optimization phase, it's very important to take into account the system efficiency. The motor itself will present the highest efficiency at high speed, but higher speeds require a gearbox with a larger gear ratio. The higher the gear ratio, the lower the gearbox efficiency. The designer will have to select the best compromise between them.
An encoder, important for closing the position loop, is defined by its resolution and its efficiency. Different options exist, such as optical, magnetic with hall sensor, and magnetic with magneto-resistance. Today the trend is to use the latter, with the advantage of providing an extremely high resolution in a tiny package. Dedicated ASICs used in such encoders are able to interpolate two sine-shaped signals in quadrature. Again, the design engineer will have to make sure the resolution and efficiency are correct.
SELECTING YOUR MOTOR
No universal technology solves all applications, but for each situation, there are solutions with various advantages and disadvantages. To optimize a solution with specific criteria requires much expertise and access to different technologies.
During the design phase, project engineers should work closely with mechanical specialists, motor experts and electronic designers in order to take into account the entire system and not just a part of it.

Explore the October 2007 Issue
Check out more from this issue and find your next story to read.
Latest from Today's Medical Developments
- Arcline to sell Medical Manufacturing Technologies to Perimeter Solutions
- Decline in German machine tool orders bottoming out
- Analysis, trends, and forecasts for the future of additive manufacturing
- BlueForge Alliance Webinar Series Part III: Integrate Nationally, Catalyze Locally
- Robot orders accelerate in Q3
- Pro Shrink TubeChiller makes shrink-fit tool holding safer, easier
- Revolutionizing biocompatibility: The role of amnion in next-generation medical devices
- #56 Lunch + Learn Podcast with Techman Robot + AMET Inc.





